UAV Obstacle Avoidance Using Q-Learning
-
Project Specifics
-
- Name
- UAV - Q-learning
-
- Academic Year
- M.S. - 1st Year
-
- Date
- Sep 2017 - Dec 2017
-
- Status
- Completed
-
- Github Link
- Click Here
-
- Project Poster
- Click Here
-
-
Project Description
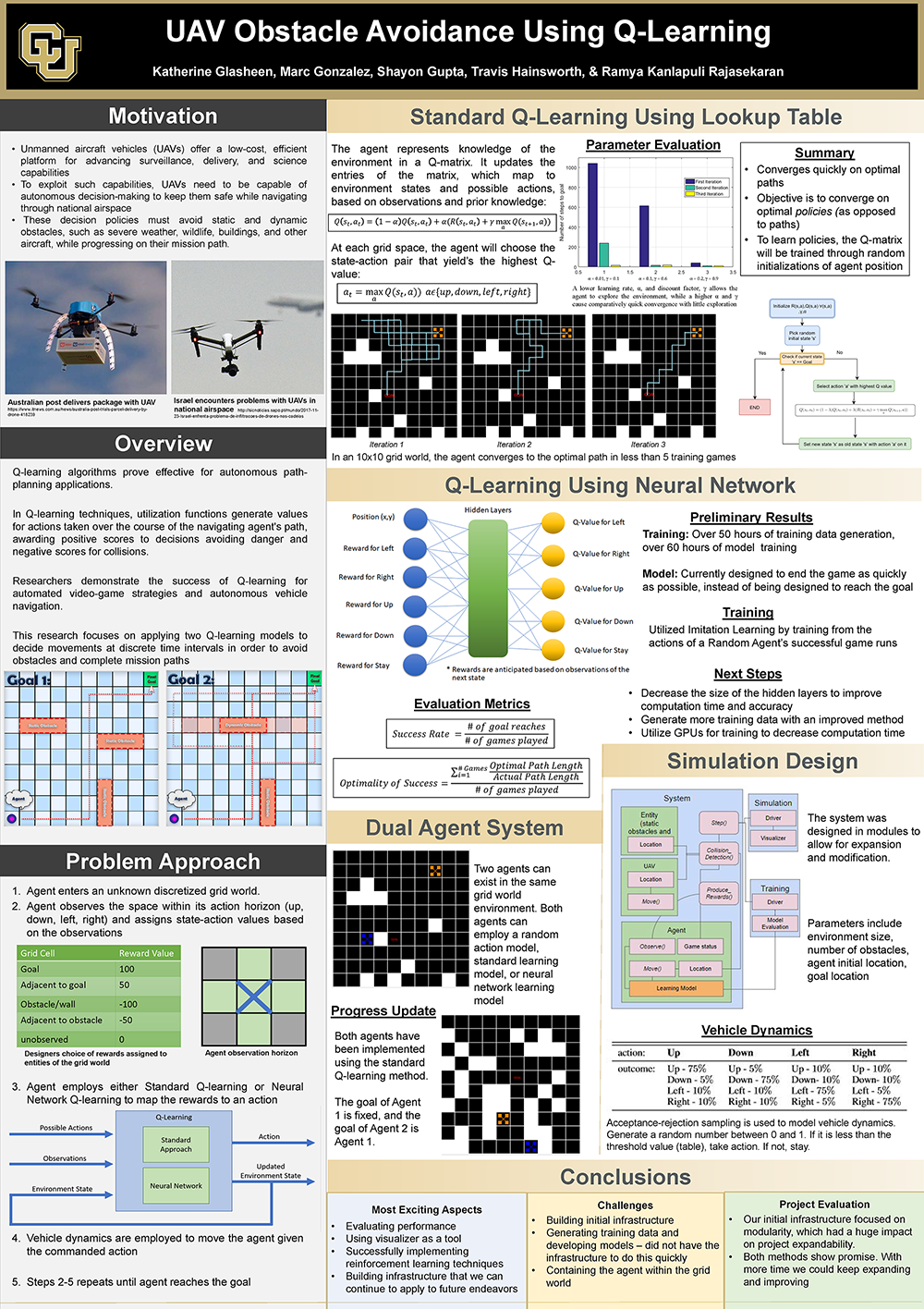
- Use of Q-Learning (Reinforcement Learning) to simulate a game between two drones. Evasion of obstacles and detection of the drone leads to a victory.
- First a single agent system was created and trained using a Neural Network and Q-Learning approach and the two methods were compared.
- From the knowledge gained we tried to develop a two agent environement. Q-Learning is not very efficient in this regard as training simultaneously led to a deadlock.
Shayon Gupta
© 2018 Shayon Gupta. All rights reserved | Powered by W3layouts